Topology-Agnostic Robotic Rebar Tying
Geometry-Driven Perception and Action for Topology-Agnostic Robotic Rebar Tying Huiguang Wang a, Zekai Jina, Yi Shao a,* a McGill Uni...
Here is Huiguang Wang (王慧光). I am a PhD student of McGill University, supervised by Prof. Yi Shao. Recently, I pay my attention to robotic assembly and sim2real dataset generation. If you are interested in any aspect of me, I would love to chat and collaborate, please contact with me at - huiguang.wang@mail.mcgill.ca
 Aug 2025 - future: McGill University (PhD), advised by Yi Shao
Aug 2025 - future: McGill University (PhD), advised by Yi Shao Sep 2022 - June 2025: Hunan University (Master), advised by Lu Deng
Sep 2022 - June 2025: Hunan University (Master), advised by Lu Deng

 Under Review
Under Review
Huiguang Wang, Zekai Jin, Yi Shao*
[Code & Dataset]
Under Review
Jiayao Zou, Wenyao Liu, Huiguang Wang, Yu Dai, Feng Zhang, Lu Deng*
 Under Review
Under Review
Huiguang Wang, Lu Deng, Jiayao Zou, Yu Dai, Shaopeng Xu, Shuo Wang*
[Code]
 Under Review
Under Review
Huiguang Wang, Zekai Jin, Yi Shao*
[Tutorial & Code]
[Demo]
 Under Review
Under Review
Shaopeng Xu, Jingjing Guo, Huiguang Wang, Lu Deng, Peng Shi, Lizhi Long
[Tutorial & Code]
[Demo]
Under Working
Huiguang Wang, Lu Deng, Shaopeng Xu*
[Tutorial & Code]
[Demo]
 Under Review
Under Review
Lu Deng, Yu Dai, Shaopeng Xu, Peng Shi, Mi Liu, Huiguang Wang*
[Tutorial & Code]
[Demo]
Geometry-Driven Perception and Action for Topology-Agnostic Robotic Rebar Tying Huiguang Wang a, Zekai Jina, Yi Shao a,* a McGill Uni...
Geometry-Driven Perception and Action for Topology-Agnostic Robotic Rebar Tying Huiguang Wang a, Zekai Jina, Yi Shao a,* a McGill Univ...
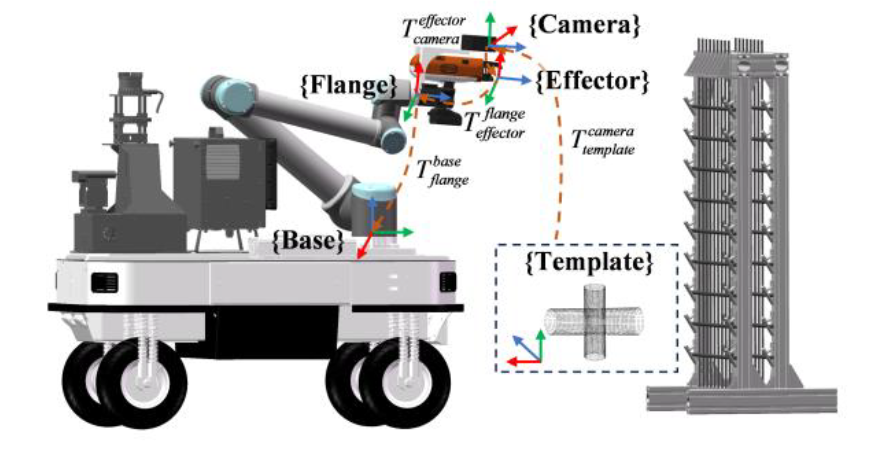
In this tutorial, we established a full framework for rebar tying aiming to diverse scenarios. This framework will tell us how to generate datasets, esti...
Tutorial-Rebar Tying and Welding Unified Framework Based on an Unsupervised Rebar Segmentation Algorithm Huiguang Wang a, Jiayao Zou b, Yu ...
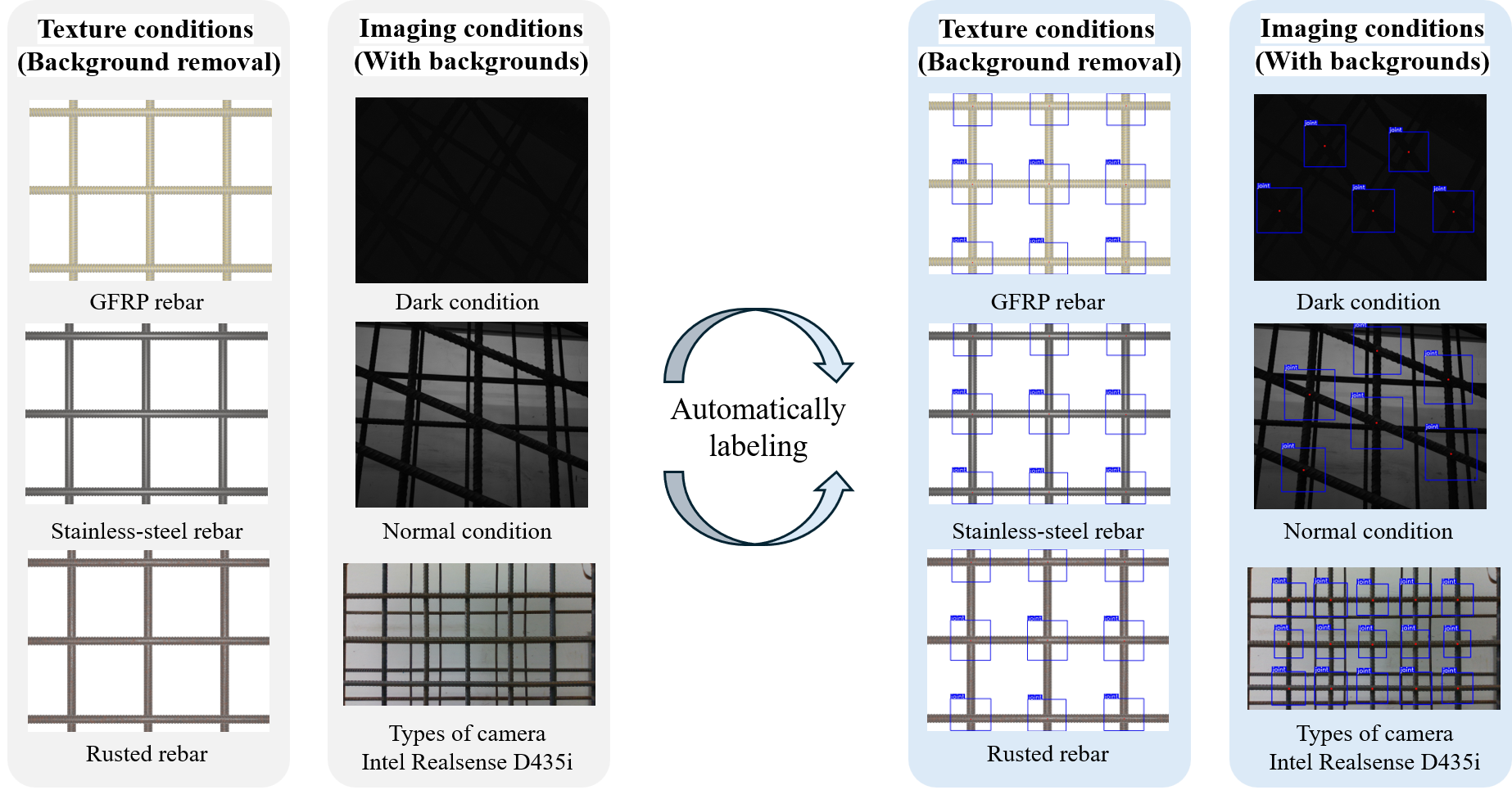
Texture-Suppressed Rapid Annotation for Construction Automation: An Application to Robotic Rebar Tying Huiguang Wang a, Zekai Jina, Yi Shao...
What long time to not update my recent progress! Recently, I have received my Master's degree of Hunan University, which means the end of my Master's per...