Geometry-Driven Perception and Action for Topology-Agnostic Robotic Rebar Tying
Huiguang Wanga, Zekai Jina, Yi Shaoa,*
a McGill University, Montreal, Canada
* Corresponding author: yi.shao2@mcgill.ca


Background & Methodology
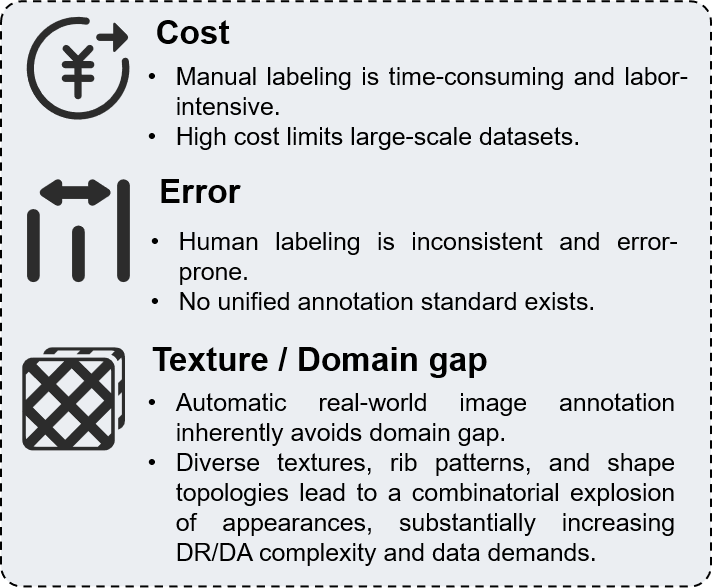
Background
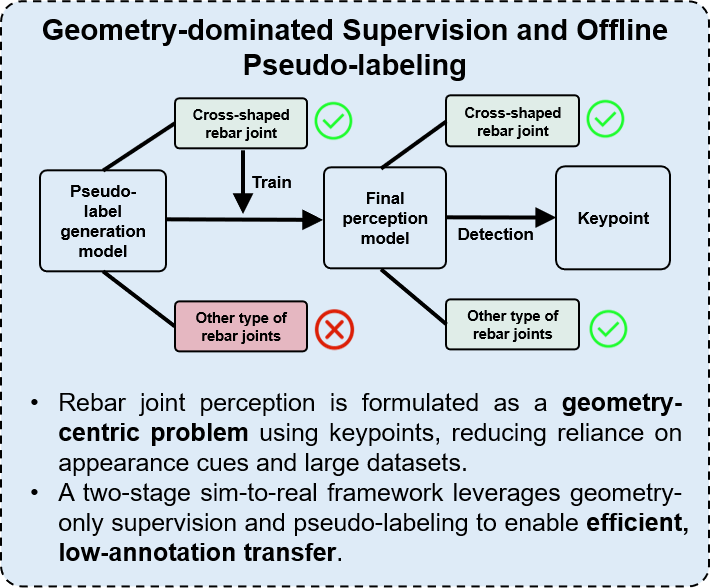
Two-stage Pseudo-labeling
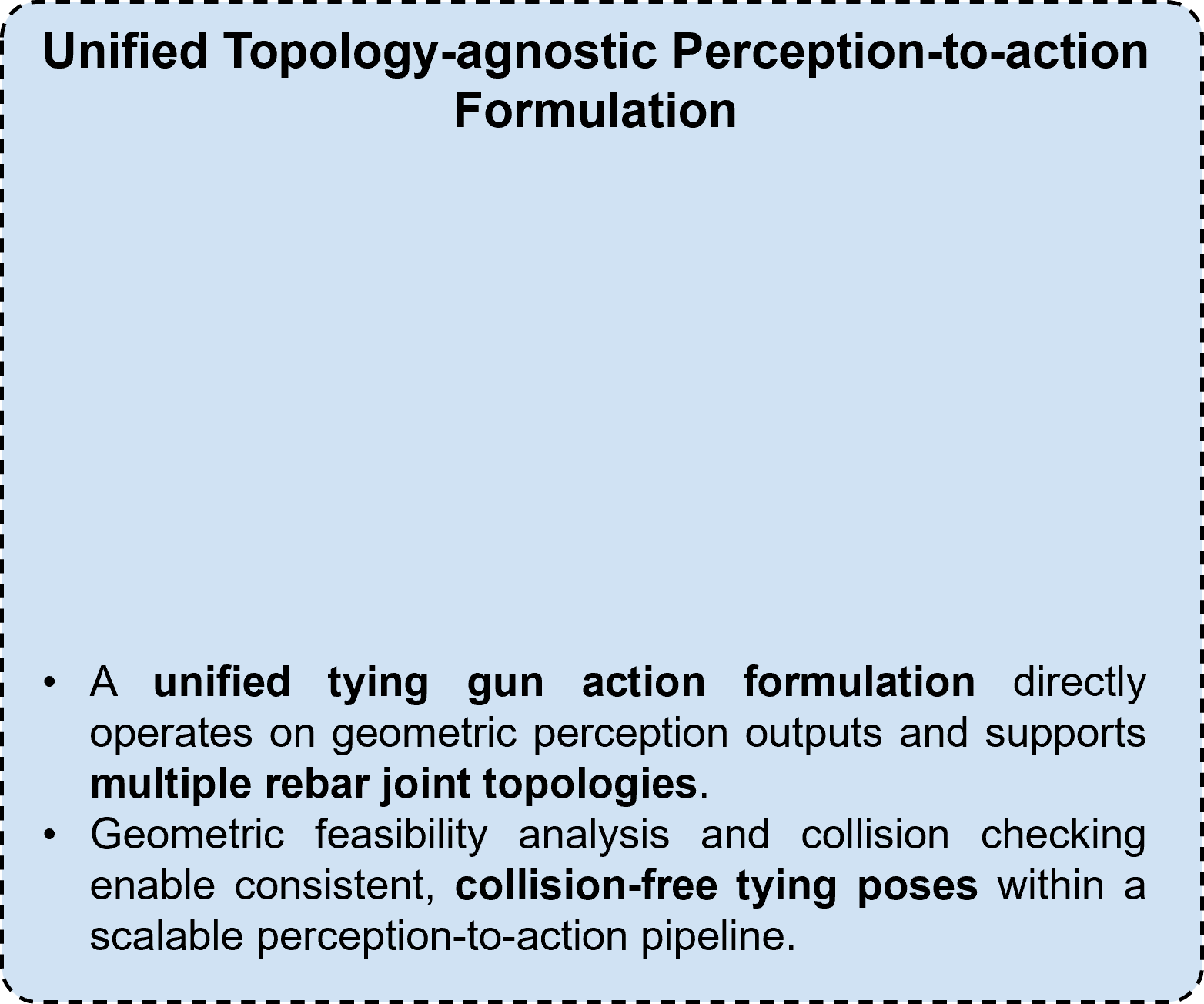
Topology-agnostic Tying Policy
Abstract
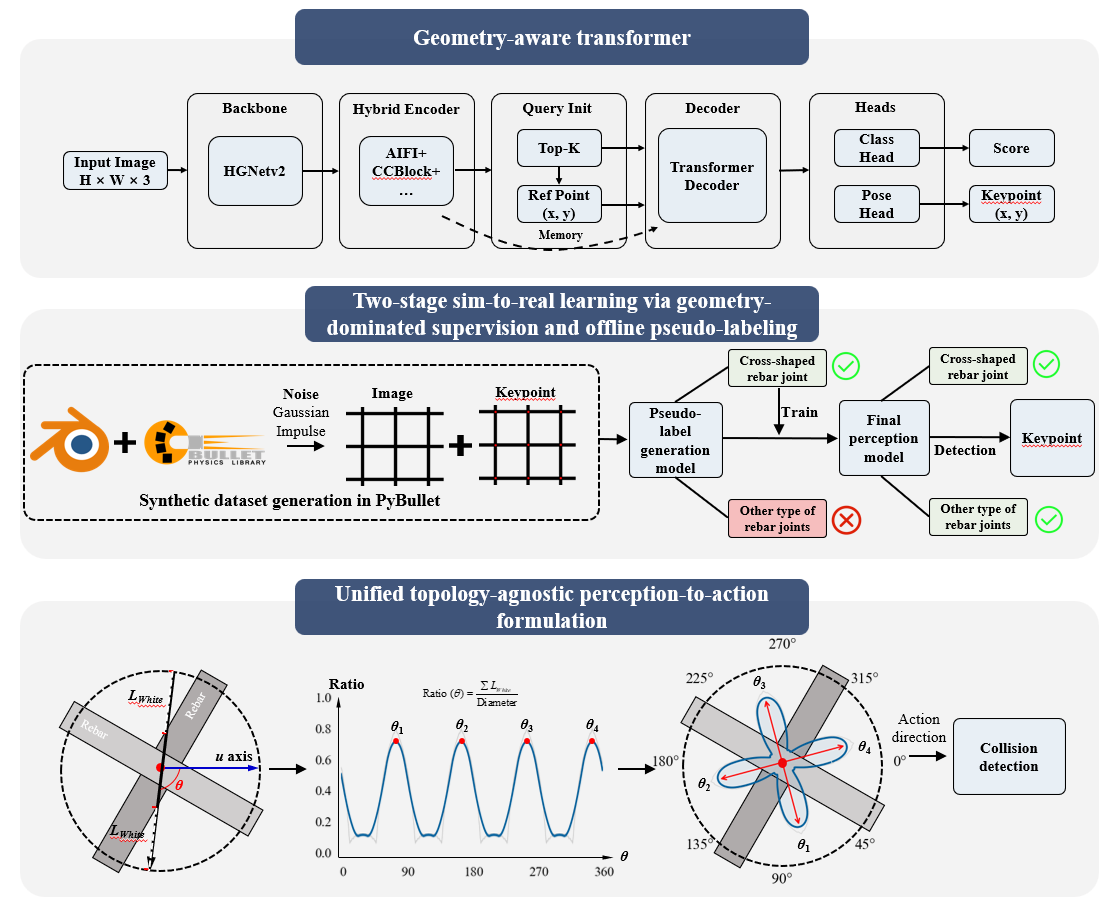
Robust detection of rebar joints remains difficult due to geometric diversity, irregular intersection configurations, and noise introduced by real-world sensing. Prior approaches predominantly depend on appearance-based cues and topology-dependent supervision, which constrains their ability to generalize. This paper reframes rebar joint perception as a geometry-dominated structural inference task and introduces a two-stage learning framework that promotes the acquisition of geometric invariants without explicit domain adaptation. In the first stage, a synthetic dataset containing only geometric information is generated to train a detector, which is subsequently fixed and used as an automatic annotator to produce reliable pseudo-labels for simple cross-type intersections in real-world images. In the second stage, a new model is trained from scratch using these pseudo-labeled real samples, thereby incorporating realistic geometric variations without manual labeling effort. Building on this formulation, a unified perception-to-action pipeline is developed that operates independently of intersection topology for robotic rebar tying.
Keywords: Geometry-dominated perception; Rebar joint detection; Sim-to-real generalization; Topology-agnostic perception; Robotic rebar tying
Framework
The dataset is currently being organized.