Geometry-Driven Perception and Action for Topology-Agnostic Robotic Rebar Tying
Huiguang Wanga, Zekai Jina, Yi Shaoa,*
a McGill University, Montreal, Canada
* Corresponding author: yi.shao2@mcgill.ca


Background & Methodology
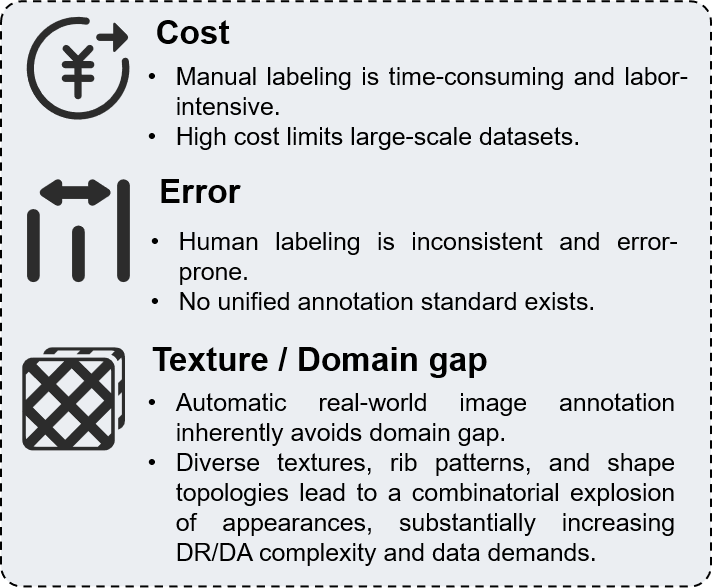
Background
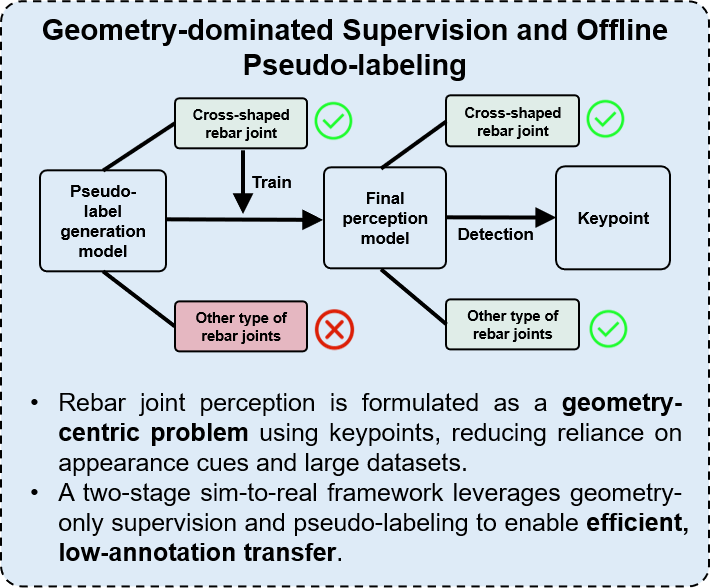
Two-stage Pseudo-labeling
Topology-agnostic Tying Policy
The code and dataset will be made publicly available after the publication of this paper.