Geometry-driven Automatic Point Cloud Annotation for Tie Bar Welding in Complex Rebar Joint
Lu Deng, Yu Dai, Huiguang Wang*, Peng Shi, Mi Liu, Jiayao Zou
College of Civil Engineering, Hunan University
* Corresponding author: whg0917@hnu.edu.cn


Abstract
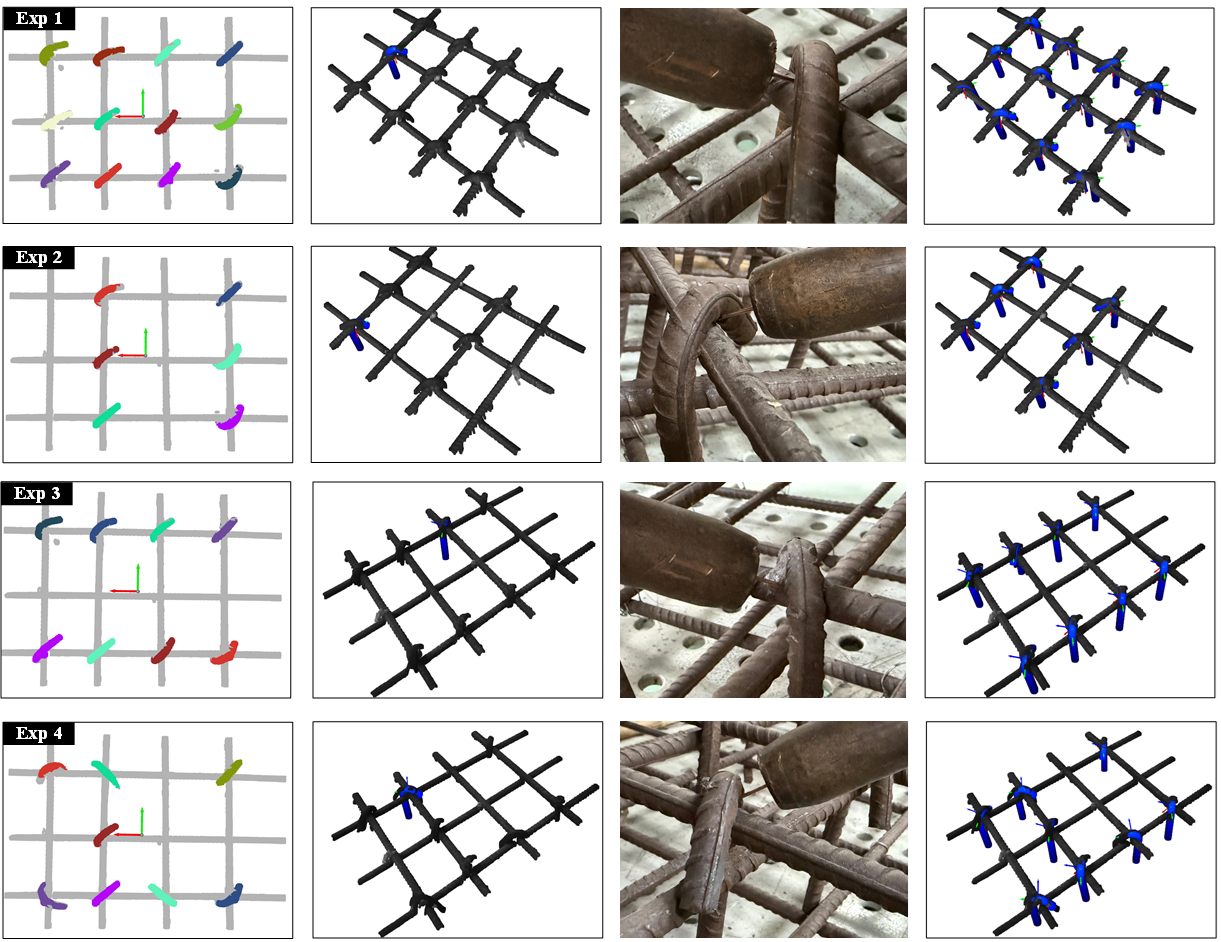
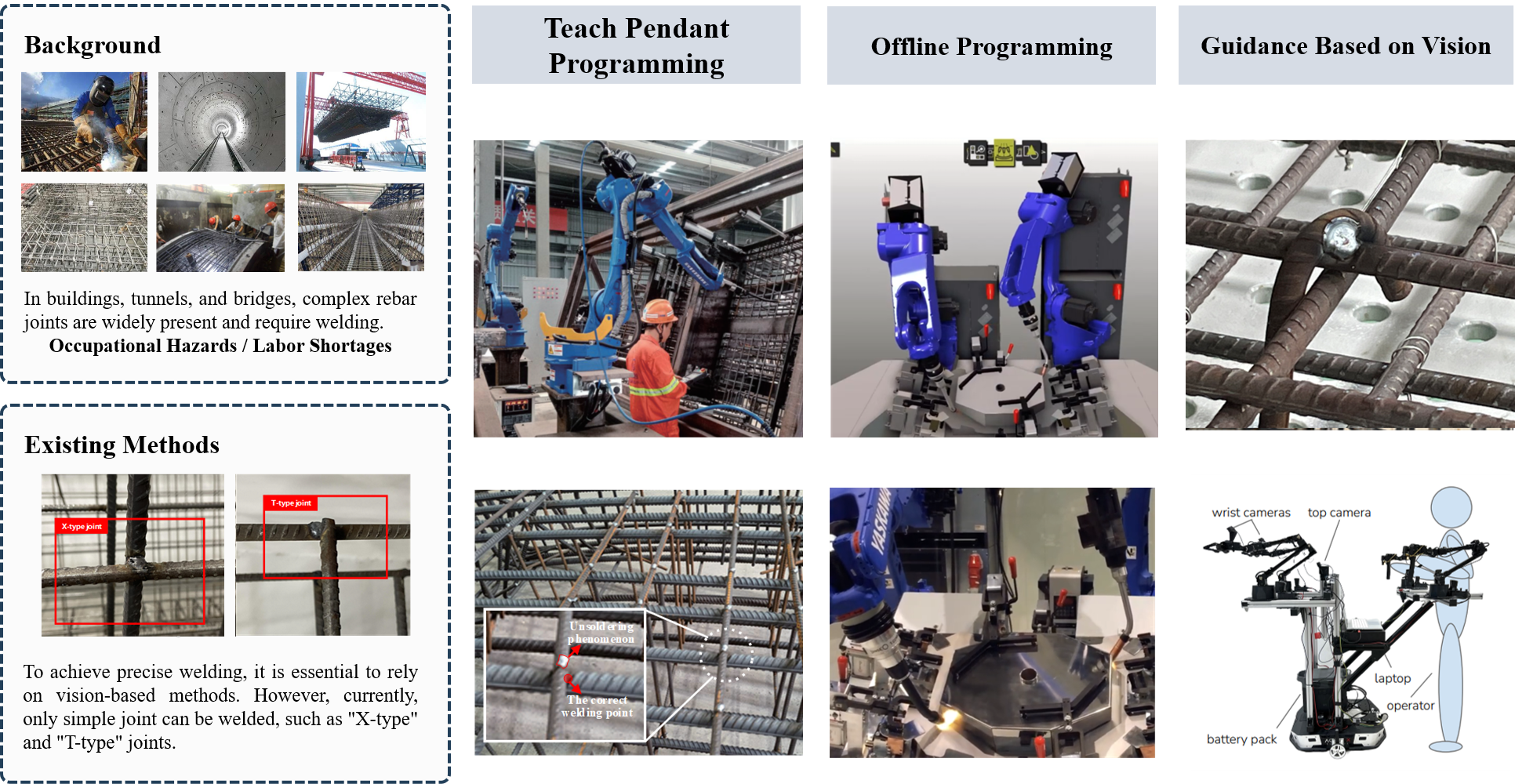
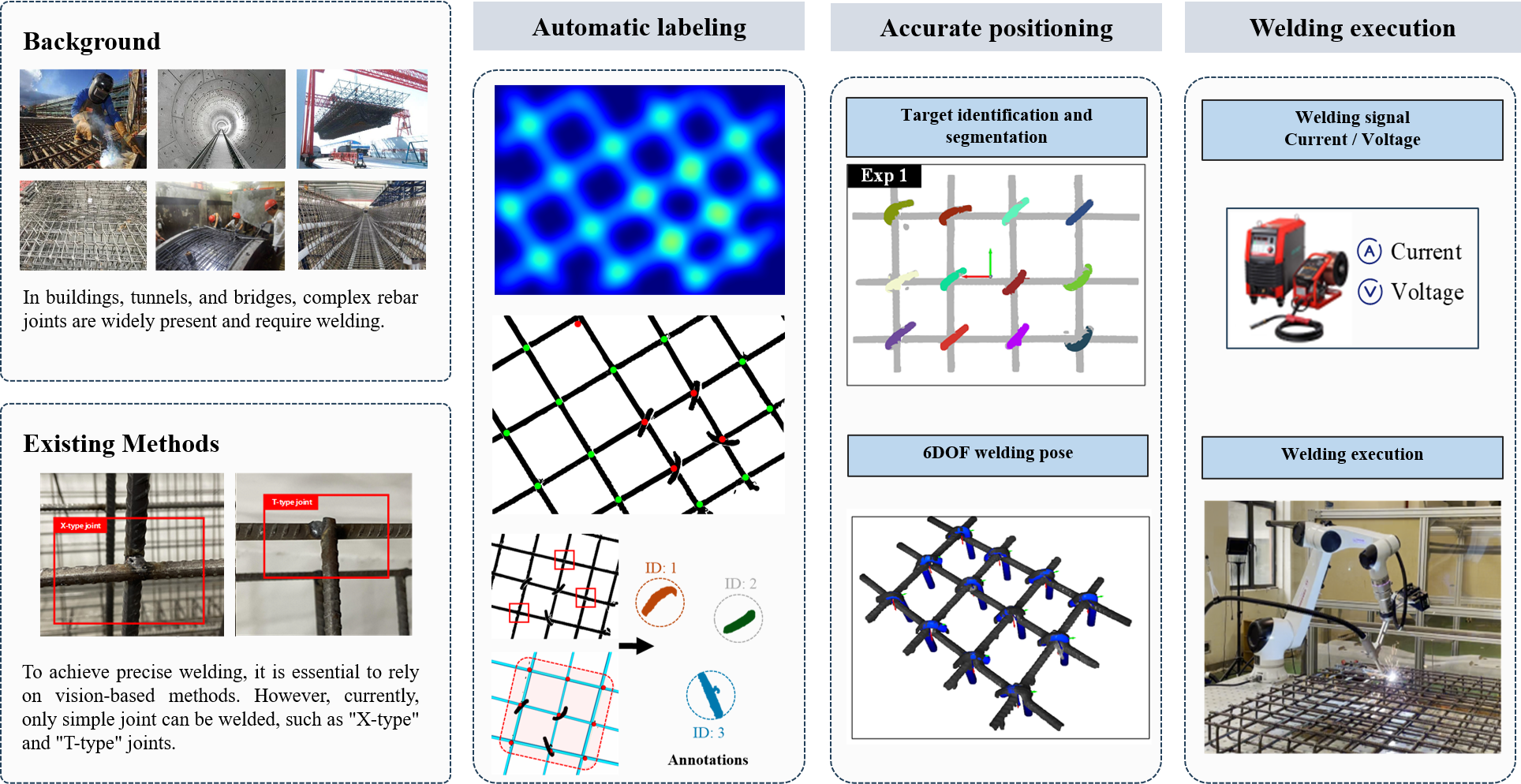
The automation of rebar cage welding is challenged by the geometric complexity of joints with tie bars and the prohibitive labor costs associated with annotating real-world datasets. To overcome these challenges, this paper proposes a geometry-driven perception and execution framework. Specifically, an automated annotation pipeline generates training labels directly from real-world RGB-D scans. By employing a heatmap-based mechanism for global ROI localization and classification, the system accurately distinguishes complex joints from standard X-type joints via local density statistics, thereby automatically providing valid candidate regions for data labeling. Leveraging inherent longitudinal-transverse geometric priors, background structures are explicitly modeled and subtracted to extract valid instances. Furthermore, to resolve pose ambiguities caused by geometric symmetry, a symmetric candidate pose strategy is introduced that accounts for multiple feasible tie bar orientations. Experiments on real-world data demonstrate a 99.12% segmentation success rate and a 98.30% welding success rate, validating the proposed methods.
Keywords: Robotic welding; Rapid annotation; Instance segmentation; Symmetry issue
Background
Pipeline
Final Results