
Tutorial-AnyDirectTying
Enhanced Vision-based 6-DoF Pose Estimation for Robotic Rebar Tying
Mi Liu, Jingjing Guo, Lu Deng, Songyue Wang, Huiguang Wang
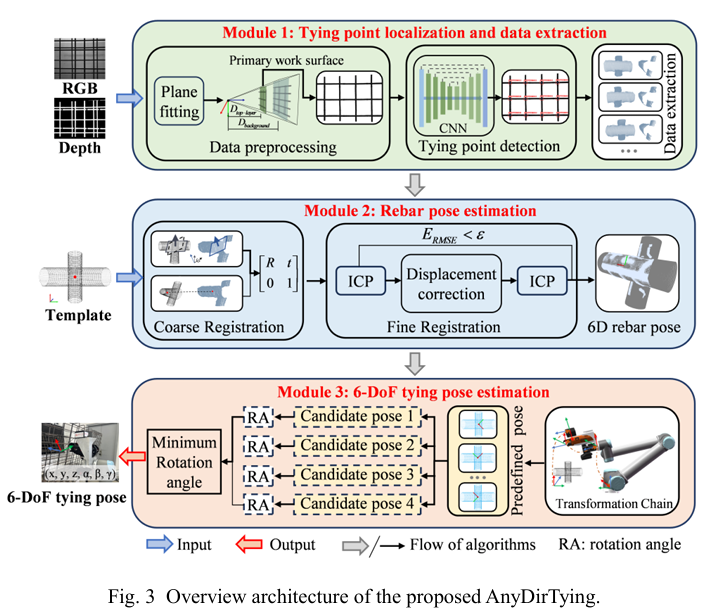
Abstract: Rebar tying is a labor-intensive and time-consuming task that involves repeatedly securing rebar intersections. While rebar tying robots have been developed to automate this process, most research focuses on tying point localization for horizontal ties, neglecting the 6 degrees of freedom (DoF) tying pose estimation required for reinforcement skeletons with rebar planes in various directions. This paper presents an any-direction robotic rebar tying method (AnyDirTying) for 6 DoF tying pose estimation. First, a deep learning-based keypoint detection algorithm extracts point clouds from rebar intersections. Next, a coarse-to-fine point cloud registration method is developed to improve the accuracy and stability of rebar pose estimation. Finally, a symmetry-aware tying strategy based on the minimum rotation angle is designed to optimize the tying pose and shorten the motion path. The proposed AnyDirTying enables flexible, accurate, and efficient tying pose estimation, expanding the applications of robotic rebar tying and reducing reliance on manual labor.
Keywords: Rebar tying; Any direction; 6-DoF tying pose; point cloud registration; Symmetry-aware
All codes and tutorials will be open source after this paper is published.
Mi Liu, Jingjing Guo, Lu Deng, Songyue Wang, Huiguang Wang
Automation in Construction, Impact Factor: 9.6 (SCI, Q1)
[Demo]