ISARC2024 in Paris
Fast-Pixel-Matching Algorithm for Automated Shear Stud
Welding Based on the Integration of 2D Drawings and
Structured Light Cameras
Huiguang Wang, Lu Deng, Ran Cao, Jingjing Guo
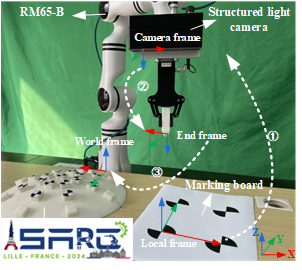
Abstract: Due to the lack of depth information, using 2D drawings to guide robotic manufacturing is difficult, such as stud welding and drilling. In this paper, a new algorithm, Fast-Pixel-Matching (FPM), is proposed to provide depth information for precise point positioning based on 2D drawings and structured light cameras. Based on our experiment, the efficiency of the FPM process is found to be at least 20 times higher than the brute-force search (BFS) method. Also, we demonstrated that the algorithm can be applied to automated stud welding, where the efficiency of positioning can be significantly improved and the positioning accuracy of the proposed method meets the code requirements.
Keywords: Point positioning; 2D drawings; Supplementation of depth information; Stud welding; 3D vision
International Symposium on Automation and Robotics in Construction (ISARC), 2024
[Click me]
Huiguang Wang, Lu Deng, Ran Cao, Jingjing Guo
International Symposium on Automation and Robotics in Construction (ISARC), 2024
[PDF]
[Demo]
[Presentation]
[Code]